Every thing is better with LEDs, right?

So my r/c car needed some. Options are just buy a kit and be stuck with the vendor possibilities or DIY.
Of course DIY!!!
After some brainstorming I decided to start small.
Level 1:
- head and tail lights
- break lights
- some blinking
- switch able from the remote
Lucky for me my remote control set has 3 channels and with it's already custom firmware I can program it to cycle throug -100%, -50%,... to 100%.
And a quick look into my electronic part bins showed yeah I have all needed parts.
BoM:
- 4x LEDs
- 4x matching resistors
- bains >> Arduino
- power main r/c battery
- some connectors ( for connecting the receiver and the LEDs, I want to be able to easily disconnect it )
- cables
- hot glue
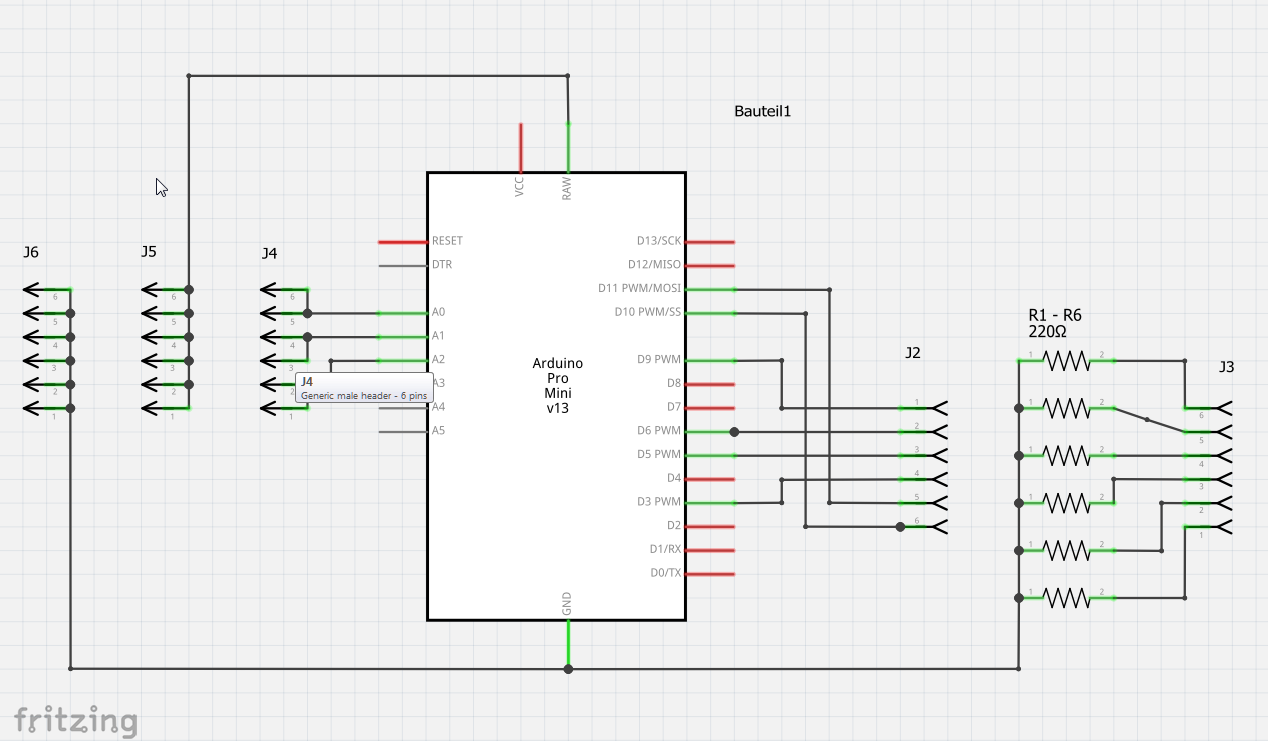
Basically the Arduino is connected in parallel to channel 2 and 3 ( throttle and the button) The Arduino reads the PWN signals from the receiver and does some LEDs blinking.
Simple right? No? here is a schematic thing
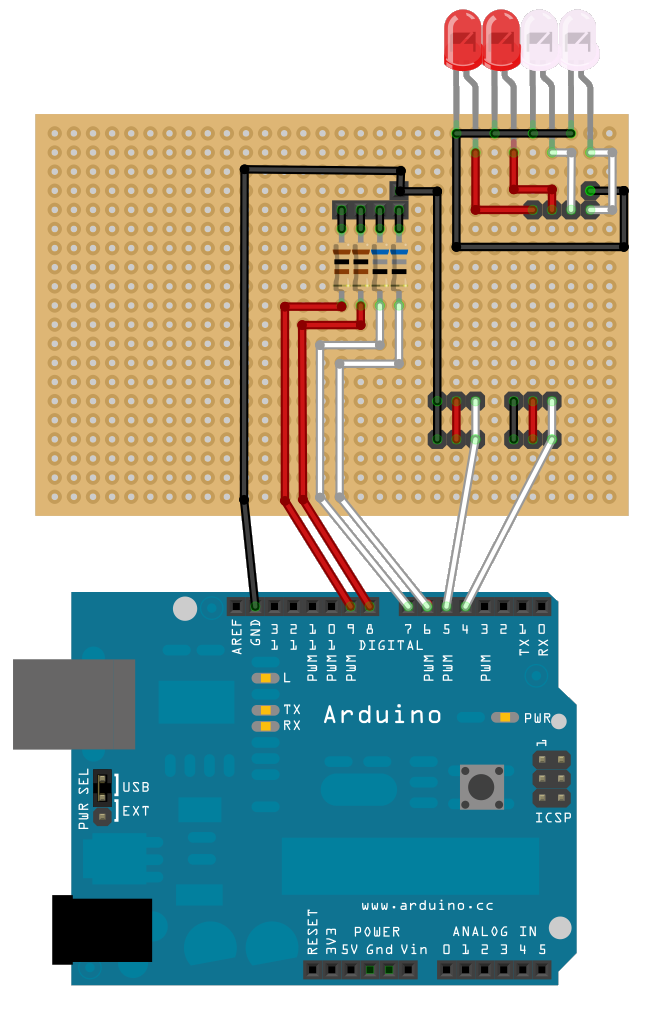
HW version 1, kind of huge 
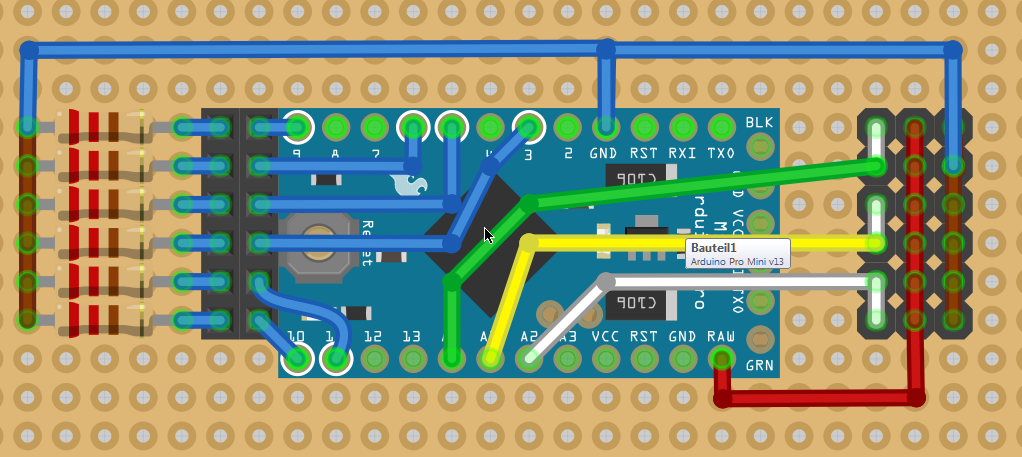
HW version 2, better.
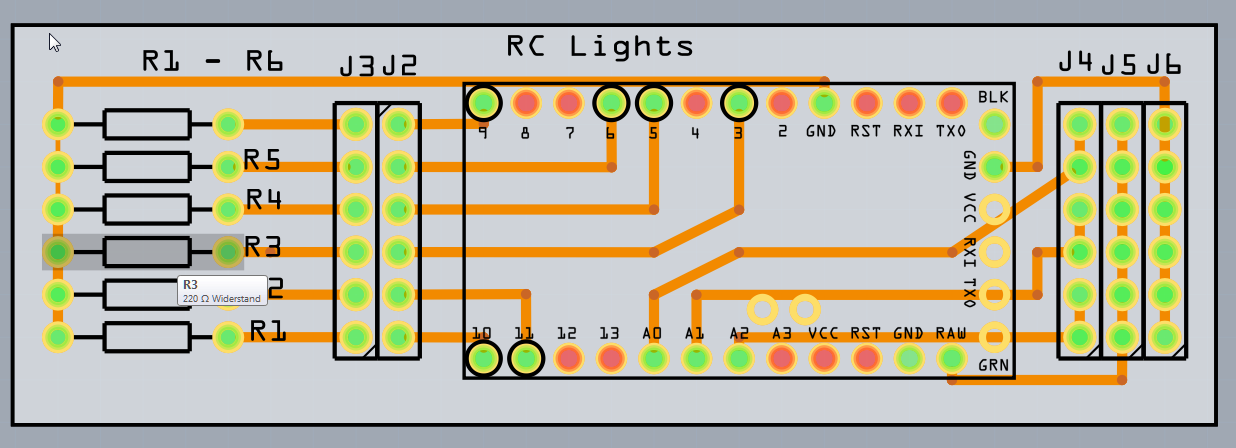
And a PCB idea
And the Fritzing project file rc-lights-v4-arduino-mini-pro.fzz
Software:
/
RC Lights by Stefan.Schmidt@knallakoff.de
Utility.h for the foreach(), pachted for IDE 1.0
v4
pro mini
http://arduino.cc/playground/Code/Utility
patch http://markus.jabs.name/2011/12/arduino-kennt-wprogram-nicht-mehr/
/
#include <Utility.h>
boolean debug = false;
//def input for 3 channel
int channel1_pin = 14;
unsigned int channel1_pulse;
int channel2_pin = 15;
unsigned int channel2_pulse;
int channel3_pin = 16;
unsigned int channel3_pulse;
int lstates[8] = {0, 0, 0, 0, 0, 0, 0, 0}; //to stor the lights start.... only 1 used until now
// only 4 are used, more to come...
byte headr = 10;
byte headl = 11;
byte backr = 3;
byte backl = 6;
byte revl = 5;
byte tr = 9;
byte tl = 12;
byte ex1 = 13;
byte lights[8] = {headr, headl, backr, backl, revl, tr, tl, ex1};
void setup(){
if (debug){
Serial.begin(9600);
}
// input setup
pinMode(channel1_pin, INPUT);
pinMode(channel2_pin, INPUT);
pinMode(channel3_pin, INPUT);
// output setup
foreach(lights, 8, pinMode, OUTPUT);
// by default all LEDs are on, so you can see if they are working
foreach(lights, 8, digitalWrite, HIGH);
}
void loop()
{
// Read the channles, CH1 Steering, CH2 Throttle and
// CH3 multi position switch, -100%, -50%, 0%, 50% and 100% on my H-GT3b with 0.41 PSX Firmware, 4 of 8 are possible positions are used
// CH1 disabled by default I do not use it (not connected) and this add delay so it does not blink so fast
//channel1_pulse = pulseIn(channel1_pin, HIGH, 20000);
channel2_pulse = pulseIn(channel2_pin, HIGH, 20000);
channel3_pulse = pulseIn(channel3_pin, HIGH, 20000);
// Some Debug to see what is read from the channels
if (debug){
Serial.print("c1: ");
Serial.print(channel1_pulse);
Serial.print(" c2: ");
Serial.print(channel2_pulse);
Serial.print(" c3: ");
Serial.println(channel3_pulse);
}
//begin switching depending on CH3 position
//CH3 100% - some fast single blinking (
if (channel3_pulse > 1900) {
if (lstates[4]== 0){
digitalWrite(lights[0], HIGH);
digitalWrite(lights[1], LOW);
digitalWrite(lights[2], LOW);
digitalWrite(lights[3], LOW);
}
if (lstates[4]== 1){
digitalWrite(lights[0], LOW);
digitalWrite(lights[1], HIGH);
digitalWrite(lights[2], LOW);
digitalWrite(lights[3], LOW);
}
if (lstates[4]== 2){
digitalWrite(lights[0], LOW);
digitalWrite(lights[1], LOW);
digitalWrite(lights[2], HIGH);
digitalWrite(lights[3], LOW);
}
if (lstates[4]== 3){
digitalWrite(lights[0], LOW);
digitalWrite(lights[1], LOW);
digitalWrite(lights[2], LOW);
digitalWrite(lights[3], HIGH);
lstates[4]= -1;
}
lstates[4]++;
}
//CH3 50% - some 4 LED blinking slower
if ((channel3_pulse > 1700)and (channel3_pulse < 1900)) {
if (lstates[4]== 0){
digitalWrite(lights[0], HIGH);
digitalWrite(lights[1], HIGH);
digitalWrite(lights[2], HIGH);
digitalWrite(lights[3], HIGH);
lstates[4]= 1;
}
else {
digitalWrite(lights[0], LOW);
digitalWrite(lights[1], LOW);
digitalWrite(lights[2], LOW);
digitalWrite(lights[3], LOW);
lstates[4]= 0;
}
delay(150);
}
//CH3 0% - LEDs blinking in X pattern - slower
if ((channel3_pulse > 1400)and (channel3_pulse < 1700)) {
if (lstates[4]== 0){
digitalWrite(lights[0], LOW);
digitalWrite(lights[1], HIGH);
digitalWrite(lights[2], LOW);
digitalWrite(lights[3], HIGH);
lstates[4]= 1;
}
else {
digitalWrite(lights[0], HIGH);
digitalWrite(lights[1], LOW);
digitalWrite(lights[2], HIGH);
digitalWrite(lights[3], LOW);
lstates[4]= 0;
}
delay(300);
}
//CH3 -50% - normal 4 LED on (normal light) if CH2 is beaking /reverse rear LEDs blink
if ((channel3_pulse > 1200)and (channel3_pulse < 1400)) {
digitalWrite(lights[0], HIGH);
digitalWrite(lights[1], HIGH);
digitalWrite(lights[2], HIGH);
digitalWrite(lights[3], HIGH);
lstates[4]= 0;
if ((channel2_pulse < 1300)) {
digitalWrite(lights[2], LOW);
digitalWrite(lights[3], LOW);
lstates[4]= 1;
delay(30);
}
if ((channel2_pulse < 1300)and(lstates[4]== 1)) {
lstates[4]= 0;
digitalWrite(lights[2], HIGH);
digitalWrite(lights[3], HIGH);
delay(30);
}
}
//CH3 -100% - lights off, if CH2 is beaking /reverse rear LEDs blink
if ((channel3_pulse > 900)and (channel3_pulse < 1200)) {
digitalWrite(lights[0], LOW);
digitalWrite(lights[1], LOW);
digitalWrite(lights[2], LOW);
digitalWrite(lights[3], LOW);
if ((channel2_pulse < 1300)) {
digitalWrite(lights[2], HIGH);
digitalWrite(lights[3], HIGH);
}
}
}
The author does not allow comments to this entry
No comments